All published articles of this journal are available on ScienceDirect.

Neural Network Based Filtering Method for Cancer Detection
Authors Info & Affiliations
Abstract
Objective:
The growth of anomalous cells in the human body in an uncontrolled manner is characterized as cancer. The detection of cancer is a multi-stage process in the clinical examination.
Methods:
It is mainly involved with the assistance of radiological imaging. The imaging technique is used to identify the spread of cancer in the human body. This imaging-based detection can be improved by incorporating the Image Processing methodologies. In image processing, the preprocessing is applied at the lower-level abstraction. It removes the unwanted noise pixel present in the image, which also distributes the pixel values based on the specific distribution method.
Results:
Neural Network is a learning and processing engine, which is mainly used to create cognitive intelligence in various domains. In this work, the Neural Network (NN) based filtering approach is developed to improve the preprocessing operation in the cancer detection process.
Conclusion:
The performance of the proposed filtering method is compared with the existing linear and non-linear filters in terms of Mean Squared Error (MSE), Peak Signal to Noise Ratio (PSNR) and Image Enhancement Factor (IEF).
1. INTRODUCTION
HE abnormal cell growth and multiplying n exponential distribution is marked as cancer. Cancer detection or diagnosis requires a detailed examination and validation process [1]. Following the clinical examination, the primary detection involves radiological imaging [2]. Upon completion of the imaging method, the automatic diagnosis of cancer can be made by employing medical image processing. In medical image processing, the accurate detection of a cancer cell can be done with the help of various image processing methodologies.
In imaging science, image processing is the method of handling pictures utilizing numerical activities and signal processing for which the information is the image and its corresponding progression or chain of images. The set of characteristics, boundaries, and parameters associated with the image is obtained as the output of the image processing. A two-dimensional signal is considered the input to the most image-processing techniques and the regular signal processing steps are applied to the input image. The system also supports the three-dimensional signal, which represents the colour and its intensity.
In medical image processing, the captured image is processed and validated in a multi-stage operation. This multi-stage operation includes Image Preprocessing (De-noising and Image Enhancement), Segmentation, Identification of required Features, Extraction of features and applying the object classification process [3, 4]. The classification process of the cancer region is differentiated from the normal region.
To acquire better performance, operations at every stage must be performed with highly significant algorithms. In the step of cancer detection, image preprocessing is the essential step, which removes the noise pixel in the image and also improves the image quality by applying the image enhancement. The filtering methods mainly distribute the pixel values based on the covered pixel region [5, 6]. In the covered region, the corresponding pixel value is computed by applying either probabilistic non-linear distribution. During the pixel value distribution, the relative value of each pixel is compared, and the significant value is identified to fill the corresponding pixel.
In Artificial Intelligence (AI), the cognitive models are mainly performed with the assistance of neural networks. Neural Network is the abstract level collaboration of neurons, which contains the information [7]. In a simple neural network, three layers are organized to produce the required processing output. Input layer, Hidden layer and Output layer are the functional controls of the NN. Predictive modelling is applied to perform the adaptive control of the neural network.
2. MATERIALS AND METHODS
2.1. Dimensions And Intensity
Advanced digital processing in the images is applied by utilizing the compute and mathematical algorithms. These algorithms are applied in the digital images by considering the input pixel as signals. Digital image processing is the subcategory of digital signal processing which has a wider range of advantages over spatial image processing. It also permits a lot more extensive scope of calculations to be applied to the info information. The noise and signal distortion related problems are avoided during the processing of the images.
In an image, the individual element represented as a pixel indicates the intensity which is organ Image Processing in Cancer Detection [8-10]. The digital image is collected entities of spatial parameters such as coordinates, seized in a particular row and column as two dimensions. In the colour image, the additional dimension is added to represent the colour vector for each pixel.
The entire detection process is based on the validation of the pixel located at a particular location [9]. The validation is applied by employing the computer vision using an informative description or artificial intelligence. In Medical Image Processing, the morphological operations and computer vision with the graphical processing are collaborating to identify or to detect the required regions.
The early diagnosis of cancer can be made by using the various detection methods, which incorporate beneficial techniques [11, 12]. These are mainly performed by applying the Color Space Transformation and Organizations. And also, the sharpening of the image object border can be done to project the background object into the foreground. This will increase the quality of the image in both linear and non-linear enhancement.
2.2. Filtering Algorithms
The filter operation is mainly performed to reduce signal frequencies and to raise others. The linear and non-linear filters are used to remove the impulse noise present in the image. The probabilistic and non-probabilistic filters such as Mean, Median, Gaussian and Wiener are used to remove the unwanted pixel points in the image.
2.2.1. Mean and Median Filters
The mean filtering is simple, non-rational and promiscuous to enforce the filtering process. The concept of mean filtering is primarily used to substitute each pixel value in an image with the average value of its nearby pixel surrounded in the processing region, including itself [13]. This has the impression of rejecting pixel values, which are atypical of their surroundings. Mean filtering is the convolution filter is generally esteemed. Like other methods, it is based around a region, which indicates the shape and size of the collection region to be sampled while calculating the average value.
The two main issues with mean filtering are:
- An individual picture element with a very atypical value can significantly impress the average value of all the pixels in its covered region.
- While the filter neighbourhood spans an edge, the interpolation will applied for pixels and produced the new values on the edge and so will change and create an impact on blurring that edge. And hence it requires the edge sharpening additionally to the enhancement.
In the median filter, each picture element in the image is processed and replaced with the median value at its nearby region, which is represented in its surroundings. Instead of simply replacing the pixel value with the mean of neighbouring pixel values, it replaces it with the median of those values. The median is computed by applying the categorization using sorting operation all the pixel values from the circling neighbourhood into mathematical order and then substituting the picture element being placed as the middle pixel value. It is relatively expensive and complex to compute since the operation includes both sorting and marking.
2.2.2. Gaussian and Wiener Filters
The Gaussian relationship between the pixel values is calculated, and the impulse responses are given as input to the Gaussian function in the Gaussian filters. The de-noising operation is applied by estimating the relationship in terms of standard deviation and variance [14]. It is also focused on band-pass and low-pass operations based on linearity. After computing the relative value, the elimination is performed.
The linear motion validation and the identification of the unfocused optic are mainly considered to perform the de-noising operation in the Wiener filters. The validation of linear time-invariant operation is applied in the Wiener filter to eliminate the noise pixel region in the image. It also identifies the lower and upper bound for the filtering instead of performing the low pass filtering, which effectively produces the de-noised image as an output.
2.3. Neural Network-Based Filtering
The noise present in the image can be adequately removed from the image by applying the de-noising methodologies in the image processing. This is not appropriate in many applications since it is removing the pixels from the image. But the removed can take pixel points and the corresponding objects can be recovered, and also the resolution loss can be avoided. The noise reduction and the resolution loss recovery are the primary objectives of the image restoration methodologies. These strategies are applied in the image domain and the frequency domain to get the effective output. The de-convolution is the clearest strategy for the restoration of the images, which utilizes the Fourier Transform of both the image and the signal [15]. The blurring factors cause resolution loss during the shift-invariant in image processing. The de-convolution method assumes the absence of noise and that the blurring system is shift-invariant, and hence it is mainly used in the noise removal process.
2.3.1. Preprocessing Steps
Noise Removal and Image enhancement are the two primary operations in the preprocessing stage. The noise removal process is applied by including the low pass, high pass, and band-pass operations. This removes the noise pixel present in the image and retrieves the original pixel values from additive noise pixel as corrupted pixel points. The boundary values in terms of threshold pixel values are identified to perform the filtering process. The identified boundary values are used to allow the limited frequency ranges in the image signal value. The linear relationship between the pixel values is considered during the noise removal process.
It also exhibits that the pixel which has the relationship with the nearest pixel in sequential structures is only considered during the filtering process. To maintain consistency and sustainability in the filtering process, the filter design must have the capability to handle both linear and non-linear relationships, such as the relationship with nearby pixel value and the pixel correlation with the objects in the image.
2.3.2. Neural Network Operations
The proposed neural network-based filter combines the significance of both linear and non-linear filters based on the impulse response of the frequency domain and the recurrence space [16, 17]. And the pixel restoration and the recovery process in the filtering stage is achieved using the logarithmic scale distribution in pixel values. Specifically, the overlapping of the frequency domain using the linear and band-pass filtering model is not allowed by Shannon’s theorem. This procedure is mainly based on the simplest statistical description concerning the pixel values and their relationship with the other pixel and the objects.
It automatically recovers the pixel values from the multiplicative noise pixel using the bounded range estimation in rows, columns, and diagonals. In data innovation and statistics technology, the operations of the human brain are approximated by the system of programs and data structures, which is termed as a neural network. A neural network normally includes an enormous number of processors working in parallel, each with its sphere of knowledge & information and admittance to information in its local memory. A large amount of data and the rules about the relationships between the data are given as input to the neural network.
This operation state is represented as the Training of the Neural Network. A program can then tell the network how to behave in response to an external stimulus or can initiate activity on its own decision. In AI and cognitive science, biological neural networks are mainly considered to build artificial neural networks (ANNs). It is used to estimate or approximate functions that can depend on a large number of inputs and are generally unknown. The individual and significant entity is generally represented as “neurons” and the neurons exchange the information with the other neurons.
The connectivity between the neurons has a larger amount of the numeric weights that can be tuned and updated based on experience which is adaptive to inputs. This process is also known as learning, which makes the neural network the perceptive thinking model. The biological model related operations are incorporated with signal processing and the statistics related to methodologies. These approaches are considered in the current software implementations of artificial neural networks. The adaptive and non-adaptive systems are combined to form the components in the neural network or the artificial neural network.
These combined systems are used in the real-world problem-solving approaches along with the traditional artificial intelligence paradigm. The local and parallel processing method with the principle of non-linear and distribution have collaborated in the neural networks. In the filtering operation, the neural network can be coupled to generate the fine output in a regulated structure. A neural network collaborates and complex structure of neurons, which shares the information. Each neuron is processed by assigning the weight in the input and hidden layer.
The filtering process is initiated with the computation of mean, variance, and standard deviation values. And the relative difference is computed between the mean value and pixel values in the row, column, or in diagonal pixel series. By utilizing these entities, the upper and lower bound are computed for the filtering process along with the inverse filter operation. The Linear Quadratic Estimation (LQE) is used to compute the joint probability distribution by considering the statistical noise as input. The prediction stage and the current stage are two-stage operations involved in the noise removal process. The observation of the current input with the prior knowledge is used to determine the current state of the input variable in both the prediction stage and the current stage.
In the update process, the dynamics of the system is determined using the prior state knowledge with the correlation between the pixels [18]. And the posterior state pixel values are accumulated and determined values are sued to replace the multiplicative and additive noise present in terms of noise pixels in the object region.
The neural network-based approach is conducted in two phases as Training and Testing. In the training phase, the learning engine is designed by taking the input samples. This assigns the bias and weight of each neuron given as input in the input layer. In the testing phase, the output is obtained based on the constructed neural network.
The bias and weight assignment functions are represented as the following sequence of operations. The canonical partition is applied in the learning process using Equation (1).
 |
(1) |
 |
After computing the bias, the Cosine mixture is used to generalize the pattern as follows in Equation (2).
 |
(2) |
The vectored pixel value neurons are specifically operated with the assistance of the exponential function using Equation (3).
 |
(3) |
The corresponding weight values are computed with the Sargan function represented in Equation (4).
 |
(4) |
Subject to -∞ ≤ xi ≤ ∞ The global minimum is located at x* = (0, … ,0) with f(x*) = 0.
The solution pattern for 3x3 processing region is finally obtained as Equation (5) by setting x0 = y0, x1 = u0, xi = u2(i-2), yi = u2(i-2)+1:
 |
(5) |
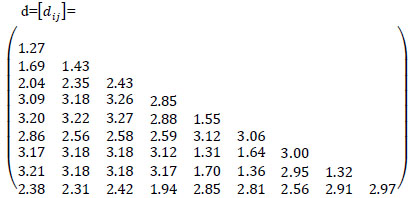
where ri.j is given by  and d is a symmetric matrix given by
and d is a symmetric matrix given by
 |
The identified weight and bias values are used to perform the filtering process of the cancer image.
2.4. Performance Evaluation
The performance evaluation of the proposed neural network-based filter is conducted using Matlab version 2014B. The input data set is collected from the UC-Berkley data set repository. The images in the input data set have a resolution of 1024x768. The input and processed outputs are depicted in Figs. (1-6). The noise density is ranged between 0.01 and 0.1.
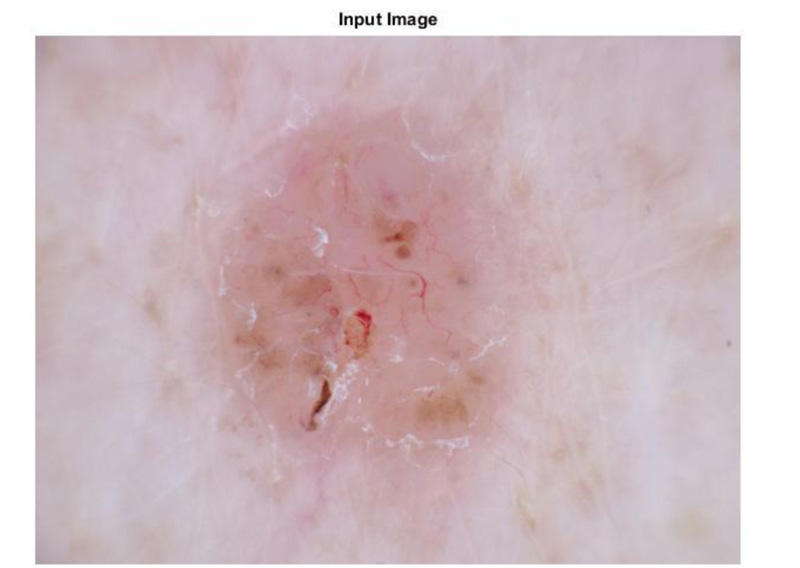
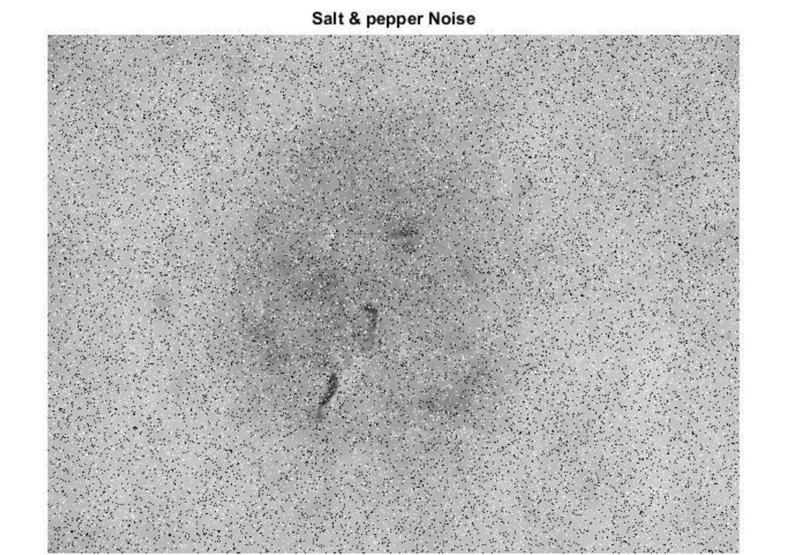
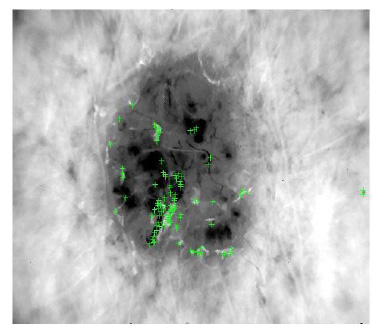
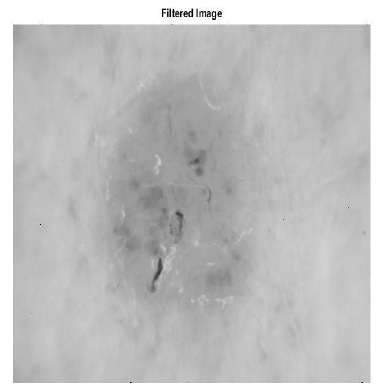
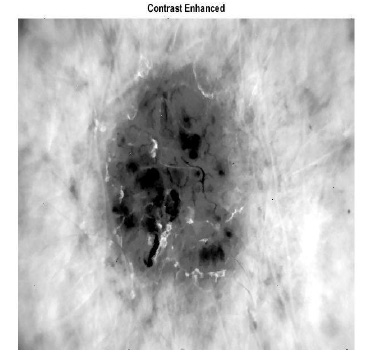
Fig. (1) shows the image given as an input to the filtering method. After applying the salt and pepper noise in the image in 20percent, the output is depicted in Fig. (2). Using the Neural network, the pixel region is identified and displayed in Fig. (3). The filtered output in grayscale and the contrast-enhanced image are displayed in Figs. (4 and 5), respectively. Fig. (6) depicts the final filtered output using the Neural Network.
The performance validation is conducted for Mean, Median, Gaussian, Wiener and proposed Neural Network filters. MSE, MAE, PSNR, Entropy and IEF are considered as evaluation metrics, and the evaluation results are displayed in Fig. (7-12).
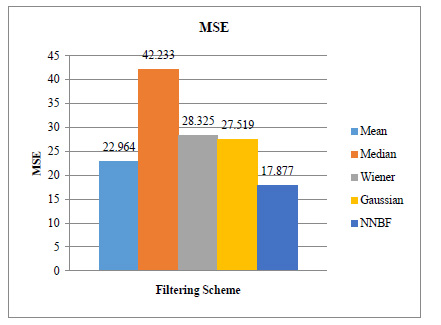
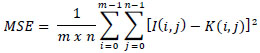
a) MSE represents the identified error pixel ratio after applying the image de-noising operation.
 |
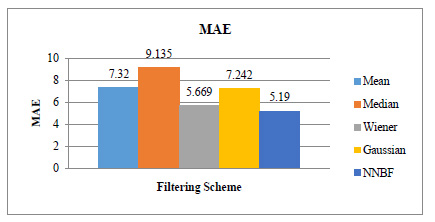
b) MAE represents the absolute difference of error ratio after applying the image de-noising operation.
 |
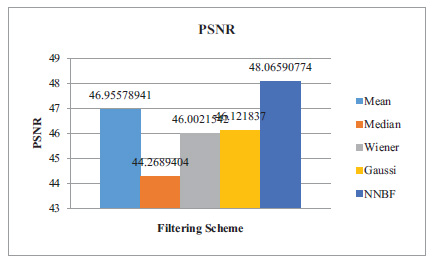
c) PSNR indicates the maximum signal value concerning the noise in the image.
PSNR = 20 log10 (MAXI)-10 log10(MSE)
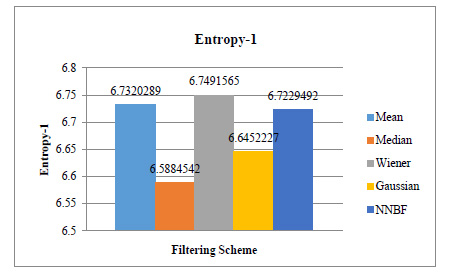
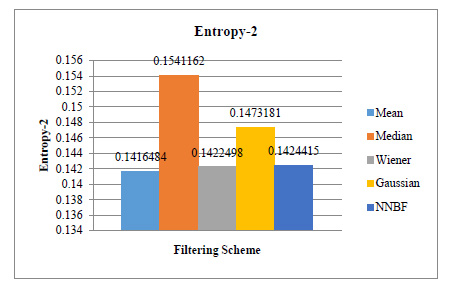
d) Entropy level 1 and 2 indicates the deviation and the covariance between the pixel points after applying the de-noising process.
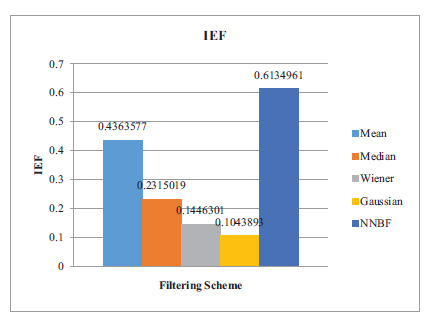
e) IEF is the ratio between the pixel values after de-noising to the pixel value before de-noising.
 |
Fig. (7) shows that the MSE values of both existing and proposed filters. The existing filters attain the MSE ranged between 22.964 and 42.233, and proposed Neural Network-based filtering achieves the MSE as 17.877. The metric shows the proposed method achieves efficient noise removal in the filtering process.
Fig. (8) shows that the MAE values of both existing and proposed filters. The existing filters attain the MAE ranged between 5.669 and 9.135, and proposed Neural Network-based filtering achieves the MAE as 5.19. It also indicates the relative error removal process concerning the nearby pixel values.
Entropy level 1 indicates the structural deviation between the pixel values, which must be ranged in moderate value compare to other filtering schemes. Fig. (9) shows that the Entropy level-1 values of both existing and proposed filters. The existing filters attain the Entropy-1 ranged between 6.5884 and 6.732 and the proposed Neural Network-based filtering achieves the Entropy-1 as 6.7229.
Entropy-2 indicates relationship deviation between the pixel values based on an object present in the Image. Fig. (10) shows that the Entropy-2 values of both existing and proposed filters. The existing filters attain the Entropy-2 ranged between 0.14164 and 0.15411 and the proposed Neural Network-based filtering achieves the Entropy-2 as 0.14244. It indicates that the proposed method attains significant performance compared to existing methods in both entropy level 1 and 2.
The PSNR Evaluation is depicted in Fig. (11). The existing filters reach the PSNR ranged between 44.27 and 46.96 and the proposed filter achieves a PSNR of 48.06. And it is stated that the proposed methodology obtains a higher performance compared to the existing filters. IEF performance results are displayed in Fig. (12), in which the existing schemes achieved values ranged between 0.01 and 0.043. And proposed NN filter achieved as 0.613. And it is exhibited that the proposed methodology obtains a significant performance compared to the existing filtering schemes.
It exhibits that the proposed scheme effectively achieves the quality improvement of pixel and the information content of original data after processing. The entire evaluation by varying the noise density shows that the neural network-based filtering methodology effectively handling the noise present in the image. And also, it stated that the filtering scheme can collaborate with the object detection process in the subsequent phases of cancer detection. The method also processes the pixel values with the dominant brightness level analysis to obtain the adaptive intensity transformation for the image captured. The scheme significantly improves the visual appearance of the image, which is very essential in the segmentation and classification stage.
CONCLUSION
The early detection of cancer is the multi-stage operation in the clinical examination. It is mainly done with the assistance of imaging techniques. In the preprocessing stage, the image de-noising and contrast enhancement operations are applied to the input image to produce an effective detection process. In this work, neural network-based filtering is developed to process the cancer image which is used to improve the quality of the processing image in the preprocessing stage. It has achieved significant performance compared to the existing filtering schemes such as Mean, Median, Gaussian and Wiener filters.
ETHICS APPROVAL AND CONSENT TO PARTICIPATE
Not applicable
HUMAN AND ANIMAL RIGHTS
Not applicable.
CONSENT FOR PUBLICATION
Not applicable.
AVAILABILITY OF DATA AND MATERIALS
Not applicable.
FUNDING
None.
CONFLICT OF INTERESTS
The authors declare no conflict of interest, financial or otherwise.
ACKNOWLEDGEMENTS
Declared none.

